Em relação à instalação do controlador, foi uma tarefa muito mais dificil que tinha imaginado, porque o sistema que tinha era totalmente integrado, e com um controlador também integrado dentro do motor. Foi preciso anular o controlador interno, passar as fases do motor para o exterior e refazer toda a cablagem externa para o guiador. Ainda não está concluido, mas deixo o estado da arte até agora.
Para abrir o motor apoiei-me nos diversos tópicos nos fórums da GoldenMotor e no Endless Spere, isto porque o controlador interno avaria com alguma frequencia e há a necessidade de o trocar.
Um das tampas removidas e o controlador interno desaparafusado:

Detalhe dos sensores de Hall:
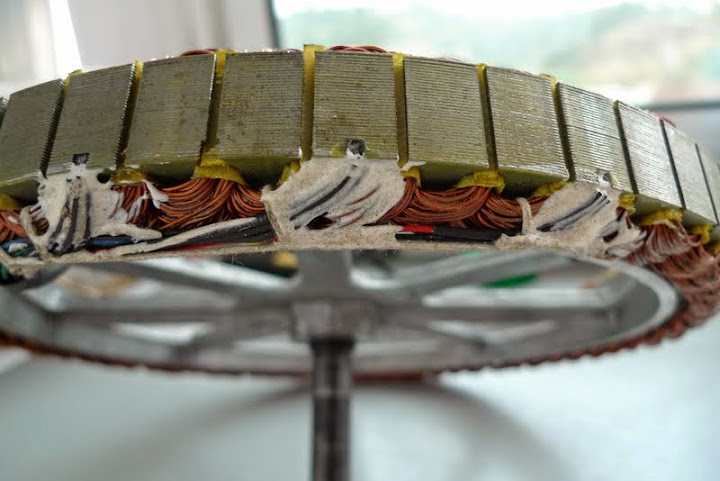
A roda sem o motor:

Fases e Halls passados pelo eixo. Aqui tive que sacrificar a espessura das fases para poder passar no eixo - Fio de silicone com 2,5 mm2, que é algo entre AWG12 e AWG14. Anda andei com uma dremel a tentar abrir mais o buraco, mas desisti.

Para compensar o diametro das fases, cortei o fio logo à saida do eixo e emendei com cabo de silicone de 6mm2 até ao controlador. Tenho comprimento necessário para anular os fios das fases do controlador e ligar direto, mas não quis arriscar nesta fase. As fases do controlador estão cheios de solda e tem condensadores demasiado perto, mas mais tarde tenho que fazer isso.

O pneu também foi substituido por um de scooter com as medidas 16-2.25, infelizmente é o maior que cabe nesta bicicleta. A medida acima 16-2.5 já tinha um piso de estrada parecido com uma scooter e devia ficar a matar! Estes pneu são maiores, tive que corrigir o perimetro no CA para o sensor de velocidade dar a velocidade correta.



Do lado do controlador abri-o e virei uma das tampas ao contrário para caber na bicicleta e agrupei todos os fios de comando num só cabo, reaproveitando a cablagem original da GoldenMotor e os conetores que são à prova de àgua. Aproveitei e soldei 3 fios adicionais - X1, X2 e SL para poder controlar diferentes velocidades com um botão de 3 posições. Podia já vir assim mas optei por deixar esta modificação de fora.
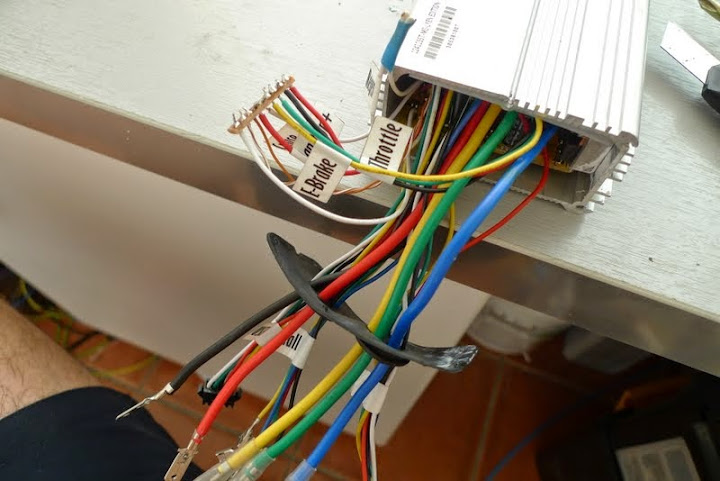
Os cabos que seguem para o guiador (cycle Analyst e Cabo redondo com o resto):

O cabo redondo tem 9 pinos que deu imenso jeito para levar para o guiador os seguintes sinais:
1 - +5v
2 - GND
3 - Throttle
4 - E-brake
5 - Cruise
6 - Ignição
7 - Speed1
8 - Speed3
9 - Speed Limit
E basicamente é isto, eis a imagem da intalação que tenho agora

As ligações das fases e dos Halls coincidem com uma das combinações já conhecidas para este motor. No CA, terminam todas as ligações que vêm do controlador, e daí derivam para os diferentes componentes - acelerador, cruise e e-brake - falta o seletor de 3 velocidades.
Depois dos primeiros testes, já tenho uma ideia das velocidades possiveis:
Com o controlador configurado para velocidade máxima (119%) obtenho os seguintes valores em teste sem carga (roda no ar):
36V - 34,8 Km/h (bateria original)
44,4V (12S) - 40,2 Km/h
66,6V (18S) - 57,4 Km/h
88,8V (24S) - 77,7 Km/h
- Com 24S, que foi o primeiro teste a bicicleta torna-se impossivel de manobrar, um cheirinho no acelerador e começa logo a espernear e a querer voar!!
- Com 18S a bicicleta fica menos nervosa e atinge as velocidades que queria - É esta a configuração que vou assumir.
- Com 12S é muito parecido com o que já tinha experimentado antes, mas desta vez os amperes estão lá e chega-se muito perto da velocidade máxima.
- Com a bateria original (36V), ainda não experimentei, mas vou ter que usar os limites do CA para não ultrapassar a corrente máxima que a bateria fornece que deve ser praí 2C.
Os proximos passos:
- instalar a bateria original - É esta que vai ser usada até que tenha solução definitiva para montar e carregar as baterias LiPo.
- Ligar as Luzes e a buzina - não sei o que vai acontecer se meter quase 76V nos Leds que tenho agora. Um fusivel vai ter de certeza...
- Medir os consumos de energia para saber quanto Ah preciso para manter ~30Km de autonomia.
APR

